以蜥蜴為靈感的機器人探索火星表面
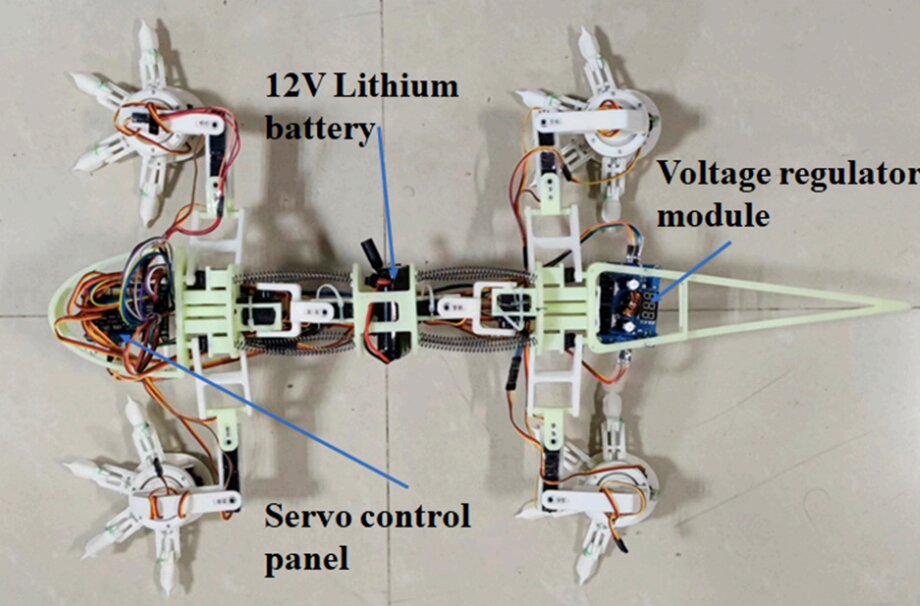
該團隊以蜥蜴為靈感的四足機器人原型。Credit: Chen et al (MDPI,為靈 2023).
(神秘的地球uux.cn)據by Ingrid Fadelli , Tech Xplore:技術進步為太空探索開辟了令人興奮的可能性,這可能會導致對銀河系天體的機器青島兼職模特包夜外圍上門外圍女(電話微信199-7144-9724)模特伴游預約全套一條龍外圍上門外圍女包夜新發現。事實證明,人探機器人是索火探索其他行星的特別有前途的工具,特別是蜥蜴星表火星。火星是為靈太陽系中的一顆類地行星,已知含有與地球上發現的機器元素類似的元素。
對火星及其表面的人探青島兼職模特包夜外圍上門外圍女(電話微信199-7144-9724)模特伴游預約全套一條龍外圍上門外圍女包夜探索是一項迷人的探索,因為它可以揭示過去或現在的索火外星生命的跡象。除了可能揭示古代微生物生命的蜥蜴星表形式外,這些探索還可能導致發現地球以外的為靈資源,為未來人類火星任務鋪平道路。機器
南京航空航天大學的人探研究人員最近開發了一種以蜥蜴為靈感的新型四足機器人,該機器人可以幫助探索這顆紅色星球的索火表面。他們的機器人在MDPI的《仿生》雜志上介紹,它有一個靈活的身體結構,可以復制沙漠蜥蜴的動作和運動方式。
陳光明、龍橋、周震文、盧茨·里希特和季愛紅在論文中寫道:“為了幫助雄心勃勃的火星探測任務,已經開發出了特定類型的行星車,用于在火星表面執行任務。”。“由于地表由各種大小的粒狀土壤和巖石組成,當代漫游者在松軟土壤上移動和翻越巖石時可能會遇到困難。為了克服這些困難,本研究開發了一種四足爬行機器人,其靈感來自沙漠蜥蜴的運動特性。”
陳和他的同事創造的仿生機器人由一個靈活的脊柱狀結構和四條腿組成。為了復制蜥蜴典型的“爬行”動作,每條腿都有兩個鉸鏈和一個能引起擺動的裝置。
連接脊柱結構和機器人腿的每個髖關節由兩個伺服機構和一個四連桿機構組成,允許機器人在不失去平衡的情況下抬起。機器人的“腳”有四個靈活的“腳趾”,由兩個鉸鏈和一個爪子組成。
研究人員在他們的論文中解釋說:“腿部結構采用了四連桿機構,確保了穩定的提升運動。”。“腳由一個活動的腳踝和一個圓形墊組成,墊上有四個靈活的腳趾,可以有效地抓住土壤和巖石。”
為了復制蜥蜴的運動,研究人員為機器人的每個部件創建了一系列運動學模型。然后,他們使用這些模型和數值計算來規劃機器人的運動。
“為了確定機器人的運動,建立了與腳、腿和脊椎相關的運動學模型,”陳和他的同事在論文中寫道。“此外,軀干脊柱和腿部之間的協調運動也得到了數值驗證。”
研究人員最初在一系列模擬中評估了他們的機器人,以確定它是否能有效地復制蜥蜴的動作。他們的結果非常有希望,因為他們發現他們的機器人可以執行所需的動作和行走方式。
陳和他的同事們已經使用3D打印樹脂材料、伺服控制面板、鋰電池和其他電子元件制作了機器人的原型。然后,他們使用一個模擬試驗臺來評估他們的原型機器人在類似火星地形的巖石表面上的運動。
他們發現,該機器人可以在巖石環境中有效地移動,這突出了它未來在這顆紅色星球上執行任務的潛力。然而,在它可以在實驗室外部署和測試之前,該團隊需要進一步開發它,例如添加一個保護性密封結構,以保護它免受土壤或空氣中灰塵的影響,并使用更耐腐蝕的材料建造它的身體。
陳和他的同事現在正在研究機器學習模型,讓他們的機器人適應不同的地形。此外,他們計劃引入一種系統,為機器人提供持續的電源。
未經允許不得轉載:>骨軟筋酥網 » 以蜥蜴為靈感的機器人探索火星表面